舵機由無核心馬達所構成,可依據接收機發出的指令,轉動至定點的位置,是各個舵面的動力來源。
伺服機的規格主要是扭力與速度,扭力的單位是 / ,意指擺臂長度1公分處所能吊起的物重。速度的單位是秒/60°,意指轉動60°所需要的秒數。
本實驗中控制舵機的 PWM 由 M16 的 PB.0 輸出,8M 晶體,vcc:5v,僅使用一個八位定時器 timer2,波形比較準確,用示波器和實測都已經通過。 分辨率為20微秒。

伺服馬達的控制:
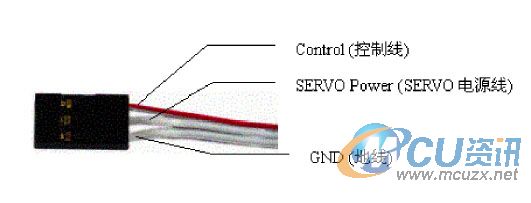
標準的微型伺服馬達有三條控制線,分別為:電源、地及控制。電源線與地線用于提供內部的直流馬達及控制線路所需的能源,電壓通常介于4V-6V之間,該 電源應盡可能與處理系統的電源隔離(因為伺服馬達會產生噪音)。甚至小伺服馬達在重負載時也會拉低放大器的電壓,所以整個系統的電源供應的比例必須合理。
控制線輸入一個周期性的正向脈沖信號,這個周期性脈沖信號的高電平時間通常在1ms-2ms之間。而低電平時間應在5ms到20ms間,并不很嚴格。下表表示出一個典型的20ms周期性脈沖的正脈沖寬度與微型伺服馬達的輸出臂位置的關系:
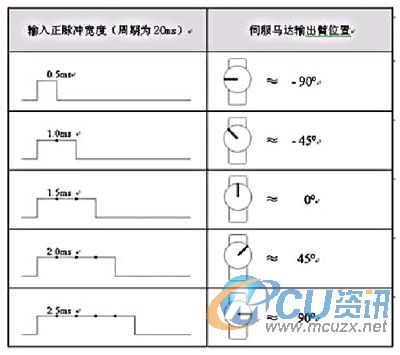
以下是形象的示意圖:
電路圖:
 可變脈寬輸出試驗(舵機控制).rar (897.74 KB)
可變脈寬輸出試驗(舵機控制).rar (897.74 KB) 
 |手機版|MCU資訊論壇
( 京ICP備18035221號-2 )|網站地圖
|手機版|MCU資訊論壇
( 京ICP備18035221號-2 )|網站地圖
GMT+8, 2025-5-1 00:11 , Processed in 0.024244 second(s), 8 queries , Redis On.
Powered by Discuz! X3.5
© 2001-2025 Discuz! Team.
 9c6dfa94d2e5ba0f6c78bf0e620077e3.jpg
9c6dfa94d2e5ba0f6c78bf0e620077e3.jpg