 實(shí)驗(yàn)?zāi)康模?/font>
通過(guò)鍵盤和串口通訊控制舵機(jī),使其按照指定的參數(shù)轉(zhuǎn)動(dòng)對(duì)應(yīng)的角度。
舵機(jī)概述:
舵機(jī)最早用于船舶上實(shí)現(xiàn)其轉(zhuǎn)向功能,由于可以通過(guò)程序連續(xù)控制其轉(zhuǎn)角,
實(shí)驗(yàn)?zāi)康模?/font>
通過(guò)鍵盤和串口通訊控制舵機(jī),使其按照指定的參數(shù)轉(zhuǎn)動(dòng)對(duì)應(yīng)的角度。
舵機(jī)概述:
舵機(jī)最早用于船舶上實(shí)現(xiàn)其轉(zhuǎn)向功能,由于可以通過(guò)程序連續(xù)控制其轉(zhuǎn)角,
因而被廣泛應(yīng)用智能小車、機(jī)械手臂以及機(jī)器人各類關(guān)節(jié)運(yùn)動(dòng)等。
 舵機(jī)組成:
舵機(jī)主要由以下幾個(gè)部分組成:舵盤、減速齒輪組、位置反饋電位計(jì)、直流電機(jī)、控制電路等。
舵機(jī)組成:
舵機(jī)主要由以下幾個(gè)部分組成:舵盤、減速齒輪組、位置反饋電位計(jì)、直流電機(jī)、控制電路等。
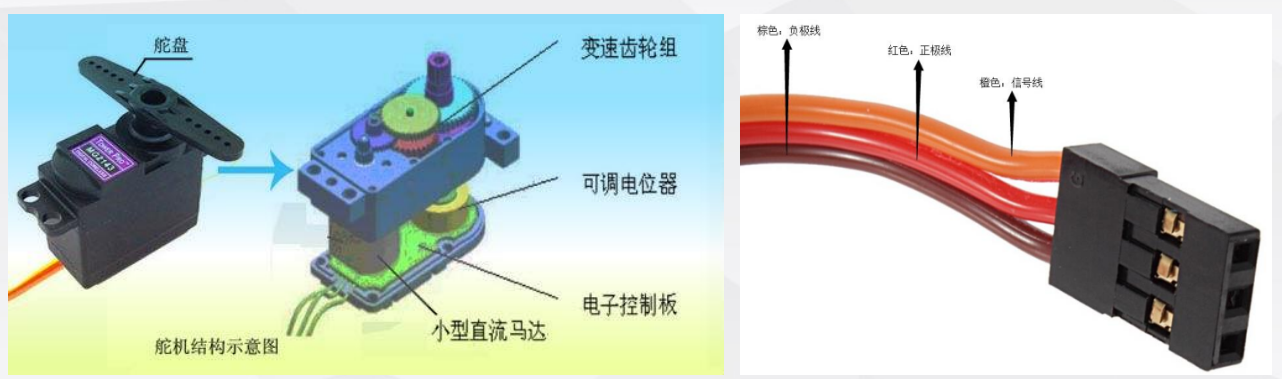 電機(jī)控制板主要是用來(lái)驅(qū)動(dòng)電機(jī)和接受電位器反饋回來(lái)的信息。電機(jī),動(dòng)力的來(lái)源了,這個(gè)不用太多解釋。電位器這里的作用主要是通過(guò)其旋轉(zhuǎn)后產(chǎn)生的電阻的變化,把信號(hào)發(fā)送回電機(jī)控制板,使其判斷輸出軸角度是否輸出正確。齒輪組的作用主要是力量的放大,使小功率電機(jī)產(chǎn)生大扭矩。 
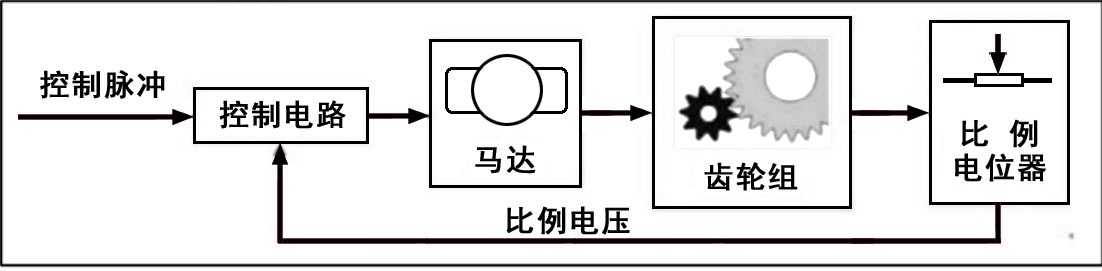
舵機(jī)工作原理:
控制電路板接受來(lái)自信號(hào)線的控制信號(hào),控制電機(jī)轉(zhuǎn)動(dòng),電機(jī)帶動(dòng)一系列齒輪組,減速后傳動(dòng)至輸出舵盤。舵機(jī)的輸出軸和位置反饋電位計(jì)是相連的,舵盤轉(zhuǎn)動(dòng)的同時(shí),帶動(dòng)位置反饋電位計(jì),電位計(jì)將輸出一個(gè)電壓信號(hào)到控制電路板,進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)轉(zhuǎn)動(dòng)的方向和速度,從而達(dá)到目標(biāo)停止。
電機(jī)控制板主要是用來(lái)驅(qū)動(dòng)電機(jī)和接受電位器反饋回來(lái)的信息。電機(jī),動(dòng)力的來(lái)源了,這個(gè)不用太多解釋。電位器這里的作用主要是通過(guò)其旋轉(zhuǎn)后產(chǎn)生的電阻的變化,把信號(hào)發(fā)送回電機(jī)控制板,使其判斷輸出軸角度是否輸出正確。齒輪組的作用主要是力量的放大,使小功率電機(jī)產(chǎn)生大扭矩。 
舵機(jī)工作原理:
控制電路板接受來(lái)自信號(hào)線的控制信號(hào),控制電機(jī)轉(zhuǎn)動(dòng),電機(jī)帶動(dòng)一系列齒輪組,減速后傳動(dòng)至輸出舵盤。舵機(jī)的輸出軸和位置反饋電位計(jì)是相連的,舵盤轉(zhuǎn)動(dòng)的同時(shí),帶動(dòng)位置反饋電位計(jì),電位計(jì)將輸出一個(gè)電壓信號(hào)到控制電路板,進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)轉(zhuǎn)動(dòng)的方向和速度,從而達(dá)到目標(biāo)停止。
 PWM控制舵機(jī)的方法:
PWM控制舵機(jī)的方法:
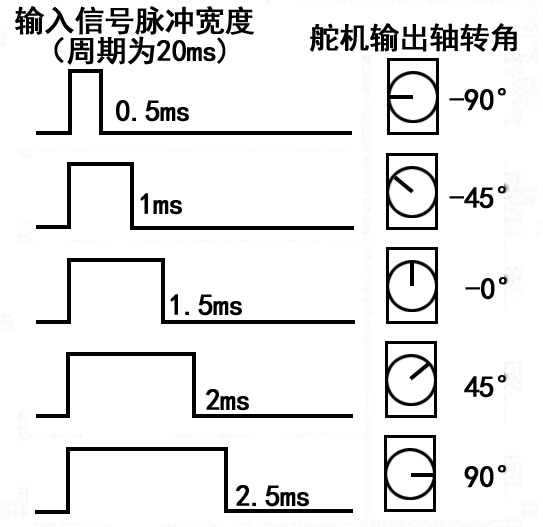 舵機(jī)的控制信號(hào)周期為 20MS 的脈寬調(diào)制(PWM)信號(hào),其中脈沖寬度從0.5-2.5MS,相對(duì)應(yīng)的舵盤位置為 0-180 度,呈線性變化。也就是說(shuō),給它提供一定的脈寬,它的輸出軸就會(huì)保持一定對(duì)應(yīng)角度上,無(wú)論外界轉(zhuǎn)矩怎么改變,直到給它提供一個(gè)另外寬度的脈沖信號(hào),它才會(huì)改變輸出角度到新的對(duì)應(yīng)位置上。舵機(jī)內(nèi)部有一個(gè)基準(zhǔn)電路,產(chǎn)生周期為 20MS,寬度 1.5MS 的基準(zhǔn)信號(hào),有一個(gè)比較器,將外加信號(hào)與基準(zhǔn)信號(hào)相比較,判斷出方向和大小,從而產(chǎn)生電機(jī)的轉(zhuǎn)動(dòng)信號(hào)。由此可見(jiàn),舵機(jī)是一種位置伺服驅(qū)動(dòng)器,轉(zhuǎn)動(dòng)范圍不能超過(guò) 180 度,適用于那些需要不斷變化并可以保持的驅(qū)動(dòng)器中。
舵機(jī)的控制信號(hào)周期為 20MS 的脈寬調(diào)制(PWM)信號(hào),其中脈沖寬度從0.5-2.5MS,相對(duì)應(yīng)的舵盤位置為 0-180 度,呈線性變化。也就是說(shuō),給它提供一定的脈寬,它的輸出軸就會(huì)保持一定對(duì)應(yīng)角度上,無(wú)論外界轉(zhuǎn)矩怎么改變,直到給它提供一個(gè)另外寬度的脈沖信號(hào),它才會(huì)改變輸出角度到新的對(duì)應(yīng)位置上。舵機(jī)內(nèi)部有一個(gè)基準(zhǔn)電路,產(chǎn)生周期為 20MS,寬度 1.5MS 的基準(zhǔn)信號(hào),有一個(gè)比較器,將外加信號(hào)與基準(zhǔn)信號(hào)相比較,判斷出方向和大小,從而產(chǎn)生電機(jī)的轉(zhuǎn)動(dòng)信號(hào)。由此可見(jiàn),舵機(jī)是一種位置伺服驅(qū)動(dòng)器,轉(zhuǎn)動(dòng)范圍不能超過(guò) 180 度,適用于那些需要不斷變化并可以保持的驅(qū)動(dòng)器中。
本實(shí)驗(yàn)所用SG90舵機(jī):
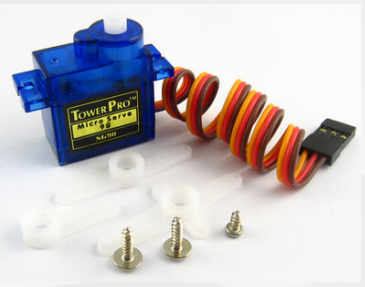
尺寸:21.5mmX11.8mmX22.7mm
重量:9克
無(wú)負(fù)載速度:0.12秒/60度(4.8V)
堵轉(zhuǎn)扭矩:1.2-1.4公斤/厘米(4.8V)
使用溫度:-30~~+60攝氏度
工作電壓:4.8V-6V
【眾拳】劍齒虎STM8舵機(jī)實(shí)驗(yàn)代碼下載:
 BSP.zip (7.55 KB)
BSP.zip (7.55 KB)  |手機(jī)版|MCU資訊論壇
( 京ICP備18035221號(hào)-2 )|網(wǎng)站地圖
|手機(jī)版|MCU資訊論壇
( 京ICP備18035221號(hào)-2 )|網(wǎng)站地圖 QQ圖片20171118172007.png
QQ圖片20171118172007.png