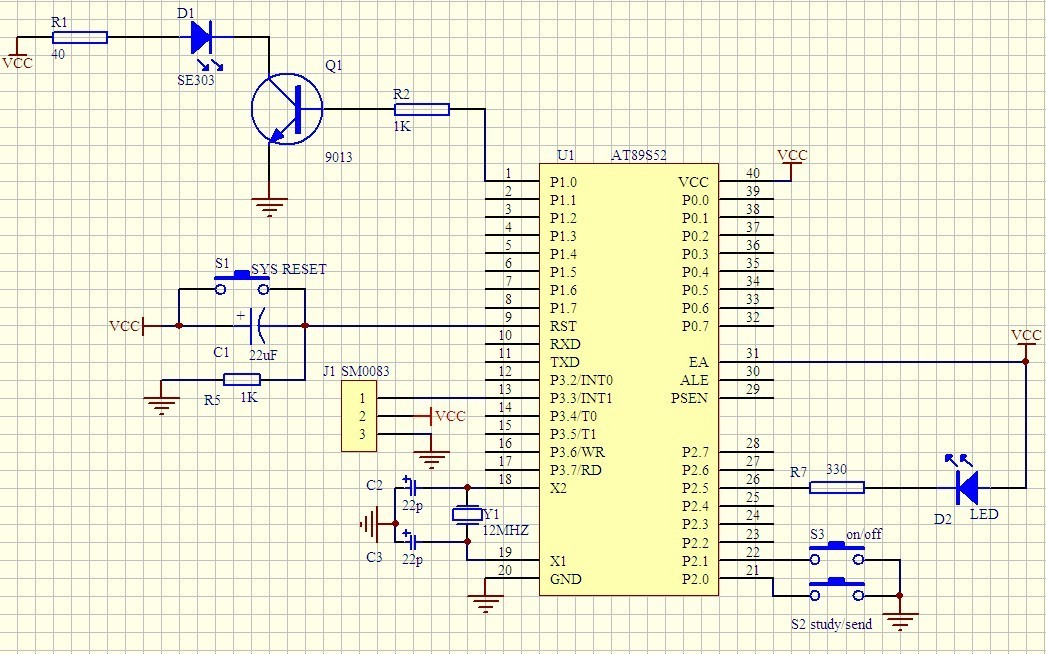
之前發過了發送部分的代碼,現在把接收部分的也貼出來,并且我也把手畫的原理圖用protel重畫了便于拿上來分享,順便也把一些參考資料放上來
接收:當單獨按下學習/發送鍵時,進入學習狀態,按下遙控上的某個鍵,若接收完畢,指示燈閃一下,再按下這個鍵,當再次接收完畢時,判斷與之間接收的數據是否一致,一致則指示燈閃一下,學習完成。
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit ir=P3^3;//紅外接收端口
sbit D2=P2^5;
bit d2_flag=0;
bit keyflag0=0;
sbit keytemp0=P2^0;//學習/發射鍵
uchar key_code=0;//遙控鍵值
uint buf_key_code=0,key_code_1=0,key_code_2=0;//鍵值暫存
uchar key_bit_count=0;//鍵編碼脈沖計數
uint count=0;//定時中斷次數計數
uint buf_count=0;//定時中斷計數暫存
uchar common_code_count=0;//前導碼脈沖計數
uchar ir_status=0;//脈沖接收器所處的狀態,0:無信號,1:系統碼接收區,2:數據編碼接收區
void delay_10us(unsigned char a)///延時子程序10us
{
unsigned char b;
for(b=a;b>0;b--);
}
void delay(uint z)//延時1ms,晶振12M
{
uint x,y;
for(x=z;x>0;x--)
for(y=199;y>0;y--);
}
/***********************************************
定時器中斷
***********************************************/
void time1() interrupt 3///定時器中斷
{
count++;//定時器中斷次數累加
}
/**********************************************
外部中斷,紅外解碼程序
**********************************************/
void int1() interrupt 2//外部中斷
{
TR1=1;//開定時器中斷
if(count>12&&count<270)//如果信號合法,則放入buf_count,count清0,對下一個脈沖信號計時
{
buf_count=count;
count=0;
}
delay_10us(10);//延時100us以消除下降沿跳變抖動
if(ir==0)//INT1引腳穩定為低電平,則表法確實是信號,count重新計時,因上面延時了100us,故要補償1次TO中斷
{
count=2;
}
if(buf_count>12&&buf_count<270)//若收到的信號合法,則再進行信號分析(0.6-13.5ms)
{
if(ir_status==0)//如果之前未收到引導碼
{
if(buf_count>210&&buf_count<270)//判斷是否引導碼13.5ms(10.5-13.5ms)
{
ir_status=1;//系統標記
buf_count=0;//
}
}
else if(ir_status==1)///收到引導碼
{
if(common_code_count>=15)//若收完16個脈沖
{
ir_status=2;//數據解碼標記
common_code_count=0;//系統碼計算清零
buf_count=0;//中斷計數暫存清0
}
else if((buf_count>40&&buf_count<70)||(buf_count>12&&buf_count<32))//(2-3.5ms即1 或 0.6-1.6ms即0)
{
buf_count=0;
common_code_count++;//每收到一個信號自加1
}
}
else if(ir_status==2)//進入數據編碼接收
{
if(key_bit_count<8)//收到數據少于8位,則將收到的數據寫入buf_key_code
{
if(buf_count>40&&buf_count<70)//收到1
{
buf_count=0;
buf_key_code>>=1;
buf_key_code|=0x80;//收到1
key_bit_count++;//數據脈沖累加
}
else if(buf_count>12&&buf_count<32)//收到0
{
buf_count=0;
buf_key_code>>=1;//收到0
key_bit_count++;
}
}
else //若收完8位數據則做以下處理
{
ir_status=0;//接收狀態返回到空閑
key_bit_count=0;
buf_count=0;
TR1=0;
if(d2_flag==0)
{
D2=0;
delay(800);
D2=1;
d2_flag=1;
key_code_1=buf_key_code;
buf_key_code=0;
}
else
{
key_code_2=buf_key_code;
if(key_code_1==key_code_2)
{
D2=0;
delay(800);
D2=1;
key_code=key_code_2;
}
d2_flag=0;
buf_key_code=0;
}
}
}
}
}
/*************************************
主程序
*************************************/
void main()
{
ir=1; //紅外接收端口寫1(低電平開始接收)
EA=1; //開總中斷
TMOD=0x20; //定時器1,模式2,8位自動裝載模式
TH1=0XCE; //定時50us(12晶振)
TL1=0XCE;
keytemp0=1;
if(keytemp0==0)
{
delay(20);
keytemp0=1;
if(keytemp0==0)
{
keyflag0=1;//學習/發射鍵 有按鍵標志
}
}
if(keyflag0)
{
IT1=1; //INT1下降沿觸發
ET1=1; //允許定時器中斷
EX1=1; //允許外部中斷
while(1);
}
}
參考資料:
紅外遙控器原理及軟件解碼例程
http://9mcu.com/9mcubbs/forum.php?mod=viewthread&tid=950305&highlight=%E7%BA%A2%E5%A4%96%E9%81%A5%E6%8E%A7%E5%99%A8%E5%8E%9F%E7%90%86%E5%8F%8A%E8%BD%AF%E4%BB%B6%E8%A7%A3%E7%A0%81%E4%BE%8B%E7%A8%8B 加按鍵并校驗接收ok.c (3.33 KB)
加按鍵并校驗接收ok.c (3.33 KB)  |手機版|MCU資訊論壇
( 京ICP備18035221號-2 )|網站地圖
|手機版|MCU資訊論壇
( 京ICP備18035221號-2 )|網站地圖 085323u5puhd1uzp19sakm.jpg
085323u5puhd1uzp19sakm.jpg